Ein Optokoppler ist leichter nutzbar, als man anfänglich vielleicht denkt. Doch klären wir erstmal, was man mit einem Optokoppler macht:
Ein Optokoppler ist leichter nutzbar, als man anfänglich vielleicht denkt. Doch klären wir erstmal, was man mit einem Optokoppler macht:
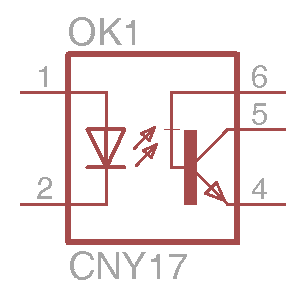
Mit einem Optokoppler überträgt man Signale und zwar nicht elektrisch, sondern mittels Licht, denn ein Optokoppler ist eigentlich nichts anderes als eine Leuchtdiode und ein Fototransistor in einem einzigen Gehäuse.
Sichtbar wird das im Schaltplan-Symbol des Optokopplers:
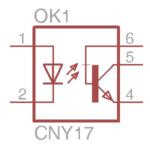
Der Vorteil der Übertragungsmethode mittels Licht ist, dass dabei keine elektrische Verbindung zwischen der Leuchtdiode und dem Fototransistor besteht.
Leuchtet die Fotodiode auf, schaltet auf der anderen Seite der Fototransistor durch.
Wir sprechen daher auch von einer galvanischen Trennung zweier Stromkreise (auch mit möglichen unterschiedlichen Spannungsniveaus) und wir können damit Signale innerhalb der Schaltungen hin- und herschicken.
Das ist vor allem dann notwendig bei einer gefährlich hohen Spannung, störverseuchten Umgebungen und zur Verhinderung von Masseschleifen.
Auch ist es möglich, das Signal mittels Optokoppler zu invertieren.
Spezielle Einsatzgebiete wären beispielsweise in Maschinensteuerungen, Relaisansteuerungen, Computern, medizinischen Apparaten, usw.
Die große Anzahl an Optokoppler sind nur für digitale Signale nutzbar (0 oder 1).
Zur Trennung analoger Signalen gibt es spezielle analoge Optokoppler.
Ich verwende hier einen CNY17/4-Optokoppler. Falls Ihr einen anderen habt, dann müsst Ihr unbedingt einen Blick ins Datenblatt werfen.
Berechnen des LED-Vorwiderstands
Der LED-Teil des Optokopplers benötigt UNBEDINGT einen Vorwiderstand, der an die Spannung der Schaltung angepasst ist. Berechnet wird das ganz genau so wie man den Vorwiderstand einer ganz normalen LED berechnet.
Hierzu brauchen wir nur das ohmsche Gesetz zum berechnen:
In unserem Test hat die Schaltung eine Spannung von U = 5V.
Die Spannung der Foto-LED von 1.5V ist ein Mittelwert, denn laut Datenblatt liegt UF zwischen 1,39V – 1.65V.
IF liegt bei 10mA.
![\[ R = \frac{U - U_F}{I_F} = \frac{5V - 1.5V}{0,010 A (10mA)} = 350\Omega \]](https://www.kollino.de/wp-content/ql-cache/quicklatex.com-13ef4d1f729526fa53eb3405565b7b86_l3.png "Rendered by QuickLaTeX.com")
Somit brauchen wir einen 350Ω-Widerstand.
Berechnen des Arbeitswiderstands
Auf der anderen Seite (Fototransistor) brauchen wir noch einen Arbeitswiderstand für die Schaltung.
![\[ R_A = \frac{V_c_c * SF}{I_F * CTR} = \frac{12V * 3}{0,010 A (10mA) * (160/100) } = 2250\Omega \]](https://www.kollino.de/wp-content/ql-cache/quicklatex.com-2ec181f3540c86399768bb875f46d111_l3.png "Rendered by QuickLaTeX.com")
RA: Arbeitswiderstand
Vcc: Betriebsspannung am Ausgang
CTR: Stromübertragungsfaktor (engl. Current Transfer Ratio)
IF: Vorwärtsstrom LED
SF: Sicherheitsfaktor
Wir brauchen wieder unser Datenblatt … In diesem suchen wir uns den minimalen ausgewiesenen CTR für unseren Optokoppler. Dieser ist abhängig vom Typ, Temperatur und möglicherweise vom LED-Strom.
Normale Transistoren haben ja eine Stromverstärkung, Optokoppler eine CTR (Current Transfer Ratio). Damit kann man abschätzen wieviel Strom man am Eingang braucht um einen bestimmten Strom am Ausgang zu schalten.
Der Sicherheitsfaktor ist mindestens 2, da die Lebensdauer eines Optokopplers in der Regel auf die halbe optische Leistung ausgelegt ist.
Je höher unser Sicherheitsfaktor, desto höher die Lebensdauer des Bauteils.
Man sollte daher zwischen einem Wert von 2-5 auswählen.
Kompromisse muss man eingehen, denn um die maximale Schaltgeschwindigkeit eines Optokopplers zu erreichen, muss man mit Nennstrom und minimalem Arbeitswiderstand arbeiten.
Zum einfachen Schalten von Relais, Motoren und dergleichen spielt die Schaltgeschwindigkeit keine große Rolle, da auch mit ausreichendem Sicherheitsfaktor der Koppler schnell genug schaltet.
Und für andere Fälle ist man mit einem High-Speed-Optokoppler besser bedient. Kostet aber halt ein wenig mehr.
Hat der Optokoppler am Transistorausgang einen herausgeführten Basisanschluss – so wie es bei dem CNY17 der Fall ist, kann man durch einen passenden Widerstand zwischen Basis und Emitter die Abschaltgeschwindigkeit deutlich steigern.
Allerdings erkauft man sich das dann auf Kosten der Empfindlichkeit.
Der Arbeitswiderstand ist in den weiter unten abgebildeten Grundschaltungen R4, bzw. R6.
Verbraucher Berechnen
Möchte man mit dem Ausgang gleich einen Verbraucher, beispielsweise ein Relais schalten, dann muss man vorher sicherstellen, den Optokopplerausgang nicht zu überlasten.
Beispiel: Wir haben ein 12V Relais mit einem Spulenwiderstand von 400 Ω (Fin 36.11.9.012-Relais).
Kleine Anmerkung: In der Regel steht der Spulenwiderstand auch im Datenblatt. Falls nicht, könt Ihr diesen wie folgt messen:
Voltmeter auf „Ω“ stellen und an den Pins des Spulensymbols messen:

Auch bei der Lastberechnung gilt das ohmsche Gesetz:
![\[ I = \frac{U}{R} = \frac{12V}{400\Omega } = 0,03 A = 30mA \]](https://www.kollino.de/wp-content/ql-cache/quicklatex.com-ccfcc4c34e80385b96b803a62cf514e3_l3.png "Rendered by QuickLaTeX.com")
Der CNY17 ist nach dem Datenblatt mit bis zu 60 mA am Ausgang belastbar.
Das funktioniert wunderbar ohne weitere Mittel (aber die Freilaufdiode am Relais nicht vergessen!).
Ist die Belastung höher, beispielsweise bei mehr als einem Relais, brauchen wir weitere Bauteile, wenn wir unseren Optokoppler nicht grillen möchten.
Mit der maximalen 60 mA-Belastung können wir beispielsweise einen Transistor, einen MOSFET oder eine Darlington-Schaltung/-IC schalten um die große Last dahinter ansteuern zu können.
Optokoppler-Grundschaltungen:
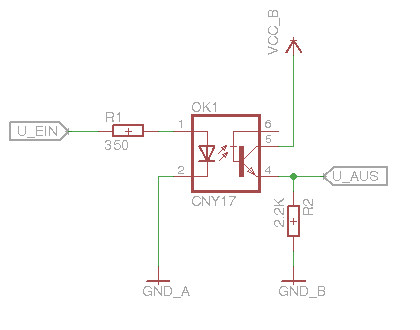
Nichtinvertierende Grundschaltung
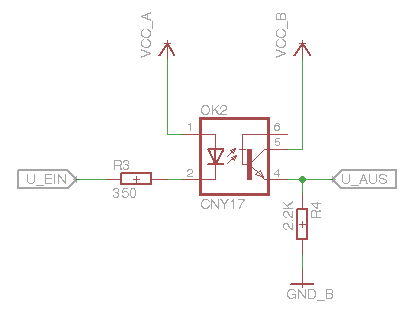
Invertierende Grundschaltung am Eingang
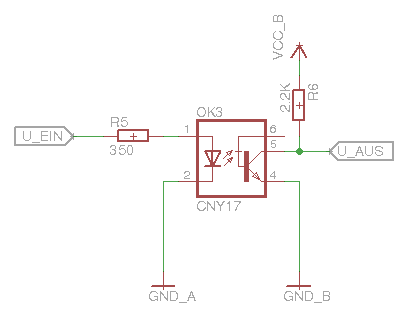
Invertierende Grundschaltung am Ausgang (häufigste Schaltung)


 Vorab: Ich habe diesen interessanten Artikel auf https://grahamwideman.wikispaces.com/Motors-+28BYJ-48+Stepper+motor+notes gefunden.
Vorab: Ich habe diesen interessanten Artikel auf https://grahamwideman.wikispaces.com/Motors-+28BYJ-48+Stepper+motor+notes gefunden.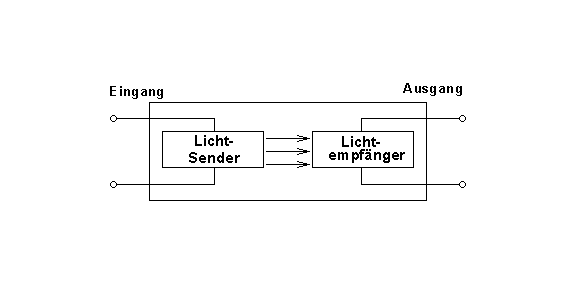

 Es ist Juni 2017 und endlich komme ich mal dazu, mich mit dem Raspberry Pi Zero zu beschäftigen, den ich mir für – ich glaube, es waren 15 EUR – letztes Jahr auf der
Es ist Juni 2017 und endlich komme ich mal dazu, mich mit dem Raspberry Pi Zero zu beschäftigen, den ich mir für – ich glaube, es waren 15 EUR – letztes Jahr auf der 
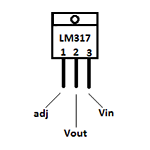 Heute bauen wir uns einen regelbaren Spannungsregler und verwenden hierzu einen LM317-Baustein.
Heute bauen wir uns einen regelbaren Spannungsregler und verwenden hierzu einen LM317-Baustein.
 Heute beginnen wir eine neue Reihe und ich erkläre Euch, wie Ihr die Kommunikation mit Eurem Raspberry sicherer machen könnt.
Heute beginnen wir eine neue Reihe und ich erkläre Euch, wie Ihr die Kommunikation mit Eurem Raspberry sicherer machen könnt.


 Heute mal ein kurzer Beitrag zum Thema Pullup- und Pulldown-Widerstände in Verbindung mit Buttons, sprich Tastern.
Heute mal ein kurzer Beitrag zum Thema Pullup- und Pulldown-Widerstände in Verbindung mit Buttons, sprich Tastern.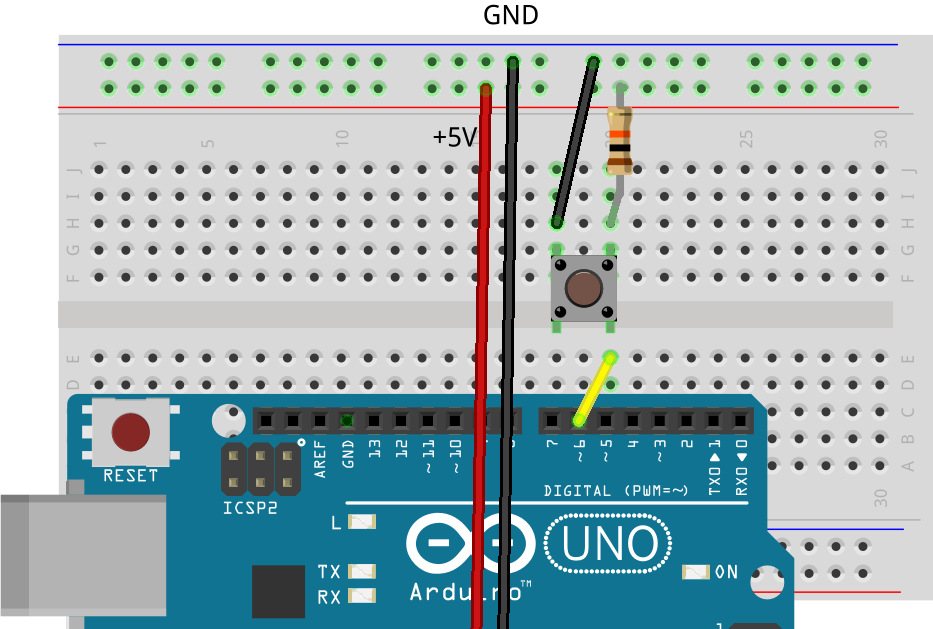
 Im vorherigen Beitrag haben wir ja unsere
Im vorherigen Beitrag haben wir ja unsere